



+84 0393.885.127
khoasp@htu.edu.vn
Khoa Sư phạm
Trường Đại học Hà Tĩnh

Bài phát biểu của sinh viên K15GDTH tại Lễ tổng kết khóa học 2022 – 2026
Chiều ngày 8/6/2026, Khoa Sư phạm đã tổ chức lễ tổng kết cho sinh viên K15 GDTH khóa học 2022 – 2026. Chúng tôi trân trọng đăng toàn văn bài phát biểu của sinh viên Phan Thị Hà Linh, Lớp trưởng K15GDTH tại buổi chia tay. Kính thưa quý vị đại biểu! Kính thưa…

83
Lễ tổng kết khóa học 2022-2026 lớp K15 Giáo dục Tiểu học
Chiều ngày 08/6, trong không khí trang trọng và đầy cảm xúc, lớp K15-GDTH ngành Giáo dục…

337
Giảng viên Trường Đại học Hà Tĩnh nhận học bổng IMU-Simons Fellowship 2025
TS. Lê Văn Hiển, Trưởng Bộ môn Toán, Khoa Sư phạm, Trường Đại học Hà Tĩnh, là một trong…

133
Khoa Sư phạm tổ chức Lễ kết nạp đảng viên
Thực hiện công tác phát triển đảng viên trong sinh viên, ngày 04 tháng 6 năm 2026, Chi bộ…

221
Lễ bảo vệ khóa luận tốt nghiệp của sinh viên Khoa Sư phạm
Sáng ngày 5 tháng 6 năm 2026, Khoa Sư phạm đã tổ chức thành công Lễ Bảo vệ Khóa luận tốt…

374
Trường Đại học Hà Tĩnh: Sinh viên khoa Sư phạm tiên phong ứng dụng AI và công nghệ vào nghiên cứu khoa học
Chuyển đổi số giáo dục không còn là mục tiêu tương lai mà đã trở thành thực tế hiện hữu,…

252
Khai thác một số phần mềm AI thiết kế video dạy học diện tích cho học sinh Lớp 5
Trong bối cảnh chuyển đổi số trong giáo dục hiện nay, trí tuệ nhân tạo (AI) là một công…
René Descartes (1596–1650) là triết gia, nhà vật lý, nhà toán học người Pháp. Năm 1637, trong 2 bài báo của mình, Descartes đã giới thiệu ý tưởng mới về việc xác định vị trí của một điểm hay vật thể trên một bề mặt bằng cách dùng hai trục giao nhau và phát triển sâu hơn khái niệm trên. Đây là đóng góp quan trọng của Descartes với toán học vì công trình này của ông là chiếc cầu nối gắn liền đại số và hình học Euclide, nó có ảnh hưởng rất lớn đến sự phát triển của ngành hình học giải tích, tích phân và khoa học bản đồ sau này.
Vì những đóng góp của ông cho hình học giải tích, tên của ông được đặt cho hệ trục tọa độ vuông góc, ở chương trình toán học bậc THPT thường gọi là "hệ trục tọa độ Oxy", "hệ trục tọa độ Oxyz" - các hệ tọa độ này có tên gọi chung là "hệ trục tọa độ Descartes vuông góc".
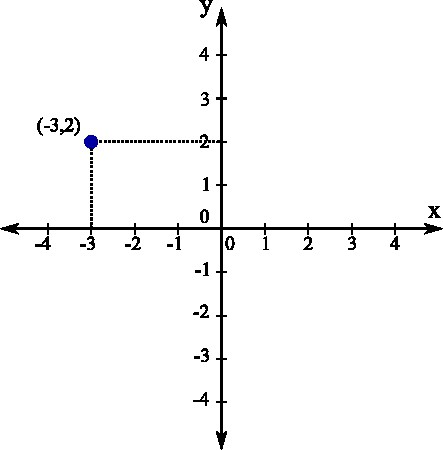
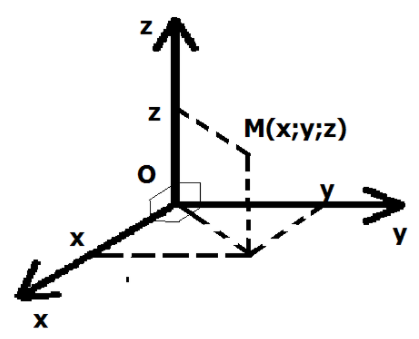
Gắn hệ trục tọa độ vào mặt phẳng, về bản chất là việc gắn 1 điểm trong mặt phẳng với 1 bộ số (a;b), do đó, có thể chuyểnviệc nghiên cứu các tính chất hình học trên mặt phẳng về nghiên cứu các tính chất trên tập hợp số tương ứng. Từ hệ trục tọa độ trong mặt phẳng với không gian 2 chiều, ta có thể thêm trục thứ 3 để mở rộng ra không gian 3 chiều, một cách tổng quát, có thể xây dựng hệ tọa độ n trục cho không gian n chiều tương ứng. Ngoài những đóng góp về mặt toán học, vật lý học, việc gắn hệ trục tọa độ vào không gian còn có nhiều ý nghĩa trong cuộc sống, nhiều tiện ích trong cuộc sống đều vận hành dựa trên 1 hệ tọa độ nào đó.
Hiện nay, việc di chuyển của con người hết sức dễ dàng, thuận lợi dù bằng đường bộ, đường sắt, đường hàng không hay đường biển. Tất cả đó đều nhờ vào hệ thống định vị toàn cầu GPS, mà hệ thống này được xây dựng dựa trên việc dựng hệ trục tọa độ Oxyz cố định gắn với trái đất, từ đó xác định tọa độ các điểm trên đó. Cụ thể, các điểm mặt đất được định vị GPS trong hệ tọa độ địa tâm xây dựng trên Elipxoid WGS-84. Hệ tọa độ có gốc tọa độ O là tâm trái đất, trục OX là đường thẳng nối tâm trái đất với giao điểm kinh tuyến gốc cắt đường xích đạo; trục OY vuông góc với OX, trục OZ trùng với trục quay trái đất và vuông góc với mặt phẳng XOY.
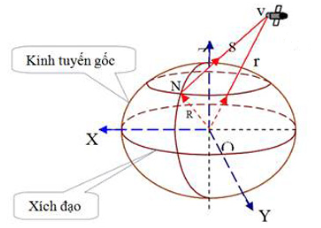
S = vectơ r - vectơ R
+) S là khoảng cách từ điểm định vị N đến vệ tinh V mà máy định vị GPS đo được.
+) Vectơ r là vectơ vị trí các vệ tinh trên quỹ đạo tại thời điểm t đã biết từ thông tin đạo hàng mà máy định vị thu được từ vệ tinh.
+) Vectơ R là vectơ vị trí các điểm cần định vị trên mặt đất tại thời điểm t nào đó.
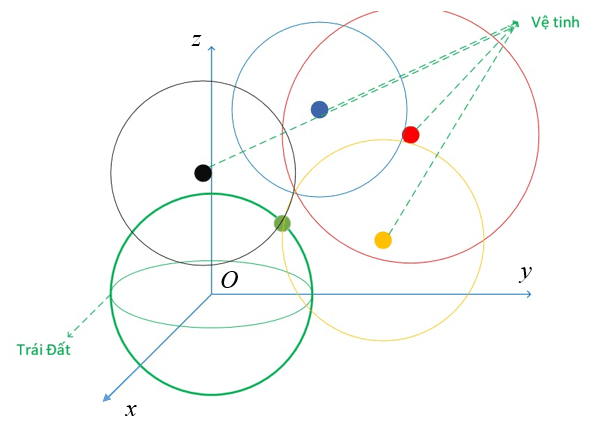
Để định vị một điểm chính xác, ta cần 3 vệ tinh đo kết quả để lập và giải hệ bốn phương trình. Số phương trình lớn hơn bốn sẽ được giải theo nguyên lý số bình phương nhỏ nhất, vì vậy càng thu được tín hiệu của nhiều vệ tinh thì độ chính xác định vị càng cao.
Hệ định vị toàn cầu GPS (Global Positioning System) được Bộ Quốc phòng Mỹ triển khai từ những năm 70 của thế kỷ 20. Ban đầu, hệ thống này được dùng cho mục đích quân sự, sau đó đã được ứng dụng rộng rãi trong các lĩnh vực khác. Với ưu điểm nổi bật như độ chính xác, mức độ tự động hóa cao, hiệu quả kinh tế lớn, khả năng ứng dụng ở mọi nơi, mọi lúc, trên đất liền, trên biển, trên không … nên công nghệ GPS đã đem lại cuộc cách mạng kỹ thuật sâu sắc trong nhiều lĩnh vực như: giao thông, đo đạc khảo sát và thi công công trình, quân sự, ... Ở Việt Nam, công nghệ GPS đã được nhập vào từ những năm 1990 và đã được ứng dụng rộng rãi trong nhiều lĩnh vực. Trong trắc địa công nghệ GPS đã được ứng dụng để thành lập lưới tọa độ liên lục địa, lưới tọa độ quốc gia cho đến đo vẽ chi tiết bản đồ.
Ngoài những lợi ích thiết thực do GPS mang lại, những lĩnh vực khác của đời sống cũng có sự đóng góp của hệ tọa độ. Chẳng hạn, gắn hệ trục tọa độ lập trình sự vận động, di chuyển cho máy móc công nghệ cao hoặc Robot. Ngày nay, một máy tính nhỏ được sử dụng làm bộ điều khiển trong máy công cụ nâng cao, máy gia công công nghệ cao và chương trình được kích hoạt từ bộ nhớ máy tính. Việc áp dụng ban đầu của điều khiển số là trong máy công cụ, cần phải kiểm soát vị trí của một dụng cụ cắt gọt liên quan đến các công việc là một phần gia công. Chương trình nâng cao đại diện cho tập hợp các lệnh gia công chi tiết, sản phẩm cụ thể. Các số được mã hóa trong chương trình là bộ số x – y – z - tọa độ trong hệ trục Descartes, dùng để xác định các vị trí khác nhau của dụng cụ cắt liên quan đến các thành phần làm việc. Bằng cách sắp xếp các vị trí này trong chương trình, máy công cụ sẽ được điều hướng để thực hiện gia công chi tiết. Hệ thống điều khiển phản hồi vị trí được sử dụng trong hầu hết các máy NC, máy CNC để xác minh rằng các lệnh được mã hóa đã được thực hiện một cách chính xác.
Hoặc để thực hiện việc gắp một vật trong không gian thì Robot cũng cần phải sử dụng hệ tọa độ để xác định tọa độ hiện tại của tay máy và tọa độ của vật cần gắp để tính toán quãng đường di chuyển. Khi Robot cần nội suy di chuyển theo đường thẳng, đường cong hay cung tròn thì một hệ tọa độ phải là bắt buộc cần để Robot có thể nội suy chính xác các trục của mình để di chuyển chính xác. Tuy nhiên, không phải tất cả các ứng dụng đều thực hiện trên hệ trục tọa độ Descartes Oxy hoặc Oxyz, tùy từng trường hợp ta có thể sử dụng các hệ trục tọa độ khác nhau hoặc cùng lúc thiết lập nhiều hệ tọa độ cho từng mục đích. Chẳng hạn, trong một Robot có các hệ tọa độ cơ bản sau:
- Tọa độ Base: tọa độ mặc định của mỗi Robot để xác định vị trí của nó và là tọa độ quy chiếu cho các hệ tọa độ khác, thông thường trong hệ tọa độ tâm được đặt tại chân của Robot và các hướng được xác định cố định theo quy ước của nhà sản xuất.
- Hệ tọa độ Tool: hệ tọa của công cụ mà Robot mang theo để thao tác làm việc vd: mỏ hàn, griper… tâm hệ tọa độ là điểm TCP(Tool Center Point). Robot sẽ dùng điểm TCP là điểm chuẩn để di chuyển nó trong không gian.
- Hệ tọa độ User: là hệ tọa độ của người dùng lập ra, có thể xác định vị trí của khu vực cần làm việc và các hướng di chuyển trong khu vực đó, giúp dễ dàng trong việc thao tác và lập trình Robot.
Khi đang học tập trên ghế nhà trường, không ít học sinh, sinh viên tự hỏi Toán học có ứng dụng gì trong cuộc sống mà chúng ta mất nhiều thời gian để học đến vậy. Hi vọng, bài viết này mang đến cho các em học sinh sinh viên một góc nhìn khác hơn về môn Toán!
(Sưu tầm và biên tập)
Tin mới
- Giáo sư Phạm Ngọc Ánh - Viện Hàn lâm Khoa học Hungary trao đổi khoa học với giảng viên và sinh viên ngành Toán - 05/12/2022 09:33
- CẢM XÚC GIỜ CHIA TAY - 11/07/2022 23:03
- Giáo dục âm nhạc góp phần phát triển trí tuệ ở học sinh tiểu học - 21/04/2022 09:38
- Tác phẩm mới: Dòng sông ký ức - 07/02/2022 20:20
- Khoa Sư phạm - Đại học Hà Tĩnh nhất Hội thi “Sinh viên với an toàn giao thông” - 14/01/2022 21:45
Các tin khác
- Món quà thanh xuân tuyệt vời tại HTU - 07/01/2022 23:13
- Vài điều về nhiệm vụ của giảng viên, nhân viên trường Đại học Hà Tĩnh năm học 2021 - 2022 - 29/12/2021 08:13
- Vai trò của “từ khóa” trong việc khám phá văn bản nghệ thuật - 21/12/2021 05:21
- Sự thật về người đầu tiên tìm ra vắc xin - 12/12/2021 22:38
- Tổ Lý - Hóa - 01/12/2021 10:05